ACC에서 탄생한 아이디어 Quanser는 수년 간 American Controls Conference(ACC)의 일원이었습니다.ACC에 갈 기회가 있어 Quanser에 대해서 물어보면”아, 그렇습니까, 그들은 진자요!”이라는 친근한 대답을 듣게 될 것입니다.이 인용문은 Quanser제어 관련 장치 목록에 있는 핵심 제품의 하나인 Qube Servo 2를 나타내고 있습니다.30년 이상의 역사 동안 Quanser는 매우 복잡하고 기능이 완벽한 솔루션 세트를 개발하고 전 세계 대학에 소개한다는 비전을 가지고 있었습니다.이런 생각으로 2020년에 발매된 Quanser QCar연구자들은 실제 운전의 복잡성과 미묘한 차이를 대학의 실내 환경에 미치는 꿈을 꿀 수 있습니다.지금까지 뭔가 문제가 있었나요?Quanser(연구 지향 설계 엔지니어 그룹)은 이 비전을 현실로 만드는 데 어떻게 도움이 되나요?이는 우리를 ACC2022로 안내합니다.교수가 사용할 모든 연구 기능을 개념화되기 쉬운 애플리케이션으로 표현하기 위한 노력의 일환으로 최고 운영 책임자인 Paul Karam은 3대의 차량 운전 시연을 설계했습니다.독자적인 위치 파악, 중앙 집중식 인프라, 기호 인식을 위한 인공 지능, 소리를 신호로 사용하는 등의 측면을 조합한 Quanser는 ACC에 상호 접속된 시스템(현실 세계와 유사)를 대학의 연구실에 도입할 수 있는 방법에 대한 아이디어를 제공했습니다.또 이 시연은 QCar를 다시 가져올 잠재적으로 자동 운전 애플리케이션에 대한 의한 대화형/참여적인 접근을 실행하는 것에 관심이 있는 2023년의 ACC위원회의 관심을 촉발할 것입니다.
그림 1: QCar 다중 차량 데모를 포함한 ACC 2022

궁극의 지도 Google지도를 펴서” 실시간 지도가 내 호주머니에 있다면 어떻게 이 지점에 도달할 수 있어?”라고 자문한 적이 있습니까?나중에 이 질문에 돌아옵니다.ACC2022에서 받은 피드백을 바탕으로 연구 커뮤니티를 참여시킬 뿐 아니라 모든 유형의 연구진이 “네, 경쟁하고 싶습니다!”라고 마음 편하게 할 만큼 일반적인 대회를 설계하도록 요청되었습니다.DARPA지하 도전을 영감으로 활용하고 기능이 풍부한 지도를 만드는 아이디어가 태어났습니다.누구나 지도가 무엇인지에 대한 아이디어를 가지고 있습니다.때에는 점유 공간과 공간의 영역을 설명하는 점유 그리드로 이해되고 이 표현은 장애물 3D기능을 포함 나 셀 맵에 확장됩니다.지도는 깊게 표현할 필요는 없습니다만, 운전 가능한 장면에 대한 이해가 더 중요한 환경에서 차선 표시와 주요 객체를 나타내는 것도 있습니다.이번 대회가 정말로 중점을 둔 부분은 바로 이것이다.여기서 우리는 처음에 묻는 질문으로 돌아옵니다만, 넓은 의미에서 무엇이 궁극의 지도를 만드는가?궁극의 자동차의 또1개의 복잡성을 추가하면 자동 운전의 도입했다.자동 운전 차의 장기적 목표는 사람의 개입 없이 원하는 목적지까지 이동하는 것입니다.팀에 최고의 지도를 작성하고 자율 스택도 구현하도록 요청할 수 있습니까?이는 우리가 학생에 소프트웨어 애플리케이션에 포함하도록 요청한 성과급 태스크이었습니다.최종 실장은 자동 운전의 타당성을 입증하는 동시에 매핑이 가능한 범위 내에 있을 겁니다.ACC챌린지, 이 두개의 아이디어는 ACC공모전의 초석이 되었습니다.학생들은 자동 공간 내에서 대기업에 다니는 자동 운전 기사의 관점을 접하게 되었습니다.각 팀에 요청한 작업은 다음과 같습니다.자동차가 운전하는 세계를 정의하는 지도를 개발할 수 있습니까?환경에서 주요 개체를 식별하고 세계 지도에 배치할 수 있을까요?이 세계 지도를 작성하면서 자동 운전의 측면을 보시겠어요?지도에서 찾은 내용을 읽을 수 있는 형식으로 요약합니다.이들 4가지 주요 개념은 최종 결과를 해석하느라 사용됩니다.
인기글

![[쇼핑몰 창업 TIP] 예비 창업자라면 꼭 확인하세요!](https://say.komeni.kr/wp-content/plugins/contextual-related-posts/default.png "[쇼핑몰 창업 TIP] 예비 창업자라면 꼭 확인하세요!")


그림 2:ACC 대회의 잠재적 채점에 대한 브레인스토밍
가상에서 물리적으로 샌디에이고 대회에 앞서 각 팀은 Windows나 Linux에서 QCar의 가상 표현에 접근할 수 있었습니다. 팀이 자유롭게 구현할 수 있도록 개발을 위해 공개된 소프트웨어 환경은 다음과 같습니다.MATLAB/SIMULINK Python 3(네이티브) ROS 1&ROS 2의 다음 과제는 Windows와 Linux 모두에서 가상 환경 지원을 보장하는 것이었습니다. Quanser의 신속한 프로토타이핑 환경 QUARC 유연성을 활용하여 모든 학생들은 개발 환경에 관계없이 센서 정보를 읽을 수 있는 능력을 갖게 되었습니다.

그림 3: ROS를 사용한 가상 QCar 테스트.

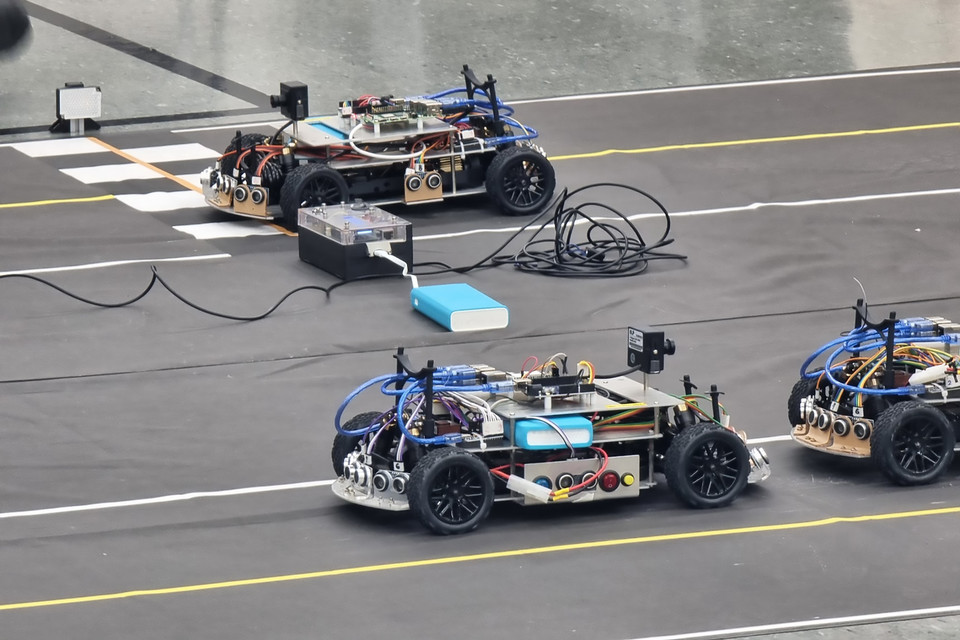
게임데이입니다 ACC2023을 앞두고 우리 앞에 놓인 과제 중 하나는 학생들이 운전하게 될 실제 지도를 사용해 가상 환경을 재현하는 것이었습니다. 유연성을 제공하기 위해 우리는 가상 맵의 기하학적 특징을 보여주는 맞춤형 건물 세트를 설계했습니다. SDCS(링크 포함) 스튜디오와 함께 제공되는 스마트 신호 덕분에 언제든지 신호를 제어할 수 있는 기능이 있고 또 다른 복잡성이 추가됐습니다.호텔에 도착한 후 스키드를 둘러본 후 Quanser 영업 및 엔지니어링 팀은 최초의 자율주행차 대회를 위한 지도를 작성했습니다.

그림 4: 물리적 테스트 스타디움을 구축하는 Quanser 팀.

그림 5: 경쟁 설정

대회 이야기 자동 운전 자동차 대회에는 총 4대학이 참가했습니다.사우스 플로리 다대 애리조나 주립대 노스 이스턴대 퍼듀대에 활용된 소프트웨어 환경은 SIMULINK와 ROS인, Python을 기본적으로 사용하는 것을 선택한 팀은 없었습니다.다음 2간 학생은 가상 환경에서 실제 시험 영역에 대한 코드의 포팅에 시간을 소비했어요.Quanser와 학생 모두 이번 대회의 차세대를 위한 많은 학습 경험을 통해서 이런 변화를 최대한 원활히 하는 방법에 관한 과제를 제시했어요.학생들은 물리적 영역의 솔루션 성능과 도전의 프레젠테이션 부분에서 구현하고 시연한 주제를 바탕으로 평가되었습니다.그림 6: 퍼듀 대학 프레젠테이션.모든 팀은 Purdue University및 Northeastern과 함께 자동 운전 및 지도 생성의 몇가지 측면을 시연하고 이 과제에 대한 접근에 대해서 인상적인 프레젠테이션을 실시했습니다.심사 위원단은 MathWorks의 Craig Buhr, MIT의 Jonathan How, 최고 운영 책임자 Paul Karam및 Quanser Academic Application팀의 나로 구성되어 있습니다.분할 결정이 내려졌지만 우승 팀은 YOLOV4물체 감지기, Occupancy Grid지도 표현, 주요 물체 식별 및 데이터 요약을 활용한 물체 감지의 인상적인 디스플레이를 갖춘 Northeastern University였습니다(작업 링크:Self-Driving Car Competition– 유튜브)그림 7: 우승 팀 – Northeastern UniversityACC2024및 그 이후 Quanser는 ACC2024에 참가할 예정입니다캐나다 토론토도 있습니다.이것은 Quanser가 더 많은 기능을 갖춘 완전한 경쟁을 펼치는 독특한 기회를 제공합니다.예비 및 현재의 Quanser사용자와 대화를 나눈 후, ACC2024기간 중, 경쟁에 관심이 많았습니다.경쟁 범위를 확대하기 위해서, 우리는 2개의 트럭 또는2개의 경쟁 모드를 작성하는 아이디어를 모색하고 있습니다.자격 기준은 Quanser하드웨어를 사용하거나 모든 팀에 경쟁적인 플레이 필드를 제공하지 않느냐에 따라서 약간 다른 경우가 있습니다.지리적 위치는 또 Quanser가 물리적 환경의 복잡성을 해결하는데 도움이 됩니다.대회 최초의 반복으로는 변화하는 표지판과 수정된 조명 조건을 보고 왔습니다.ACC2024대회의 발표에 주목하세요!Quanser는 팀이 SDCS스튜디오를 통해서 어떤 결과를 제시할지를 기대하고 있습니다!당신의 연구 기관이 QCar을 수상할지도 모릅니다!#학생자율주행대회 #자율주행차대회 #SDCS #SDRS #From Conceptto Reality #The Student Self Driving CarCompetition #개념부터 현실까지 #QUANSER #ACC2022